Achieving a Stable Periodic Walking Gait for a Planar 3 Link Robot.
Summary.
The objective of this project was to stabilize a walking gait for the three link robot around an optimal periodic trajectory using a virtual constraint based controller. The three link robot is a planar robot with 2 actuators that control the relative angle between the torso and the legs. Virtual constraints are relations between the states of the robot that are achieved through the actuators.
The hybrid system of the three link robot consists of one single stance domain, and an instantaneous double support domain. As the robot is planar, the legs are allowed to pass through each other as the robot walks. The floating base and pinned base model have 10 and 6 states respectively.
Two optimization software, fmincon and FROST, were used to generate the periodic optimal walking gait. Fmincon was used to design the trajectories for both the floating and pinned base model of the robot, while FROST was only used to generate the floating base model. The Input/Output Linearization controller was used to track the optimal gaits from both FROST and fmincon. The control objectives that were chosen were the torso angle, and the mirrow law. The mirror law states that the absolute angle of the stance leg with respect to the z axis is equal and opposite to the absolute angle of the swing leg with respect to the z axis.
The robot was able to walk an infinite amount of steps using the generated trajectories in an ideal simulator based on Matlab’s ode45.
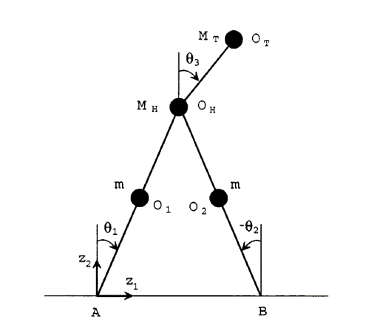
Three link planar robot[1]
References
Westervelt E., Grizzle J., Chevallereau C., Choi J., et al. Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press: 2007.