Research and Projects
-

Fall Prediction of Bipedal Robots
-

Stable Sit to Stand Motion
-

Achieving a Periodic Gait
-

Reachability Analysis and Turn in Place
-

Nonlinear MPC for Stair Climbing
-
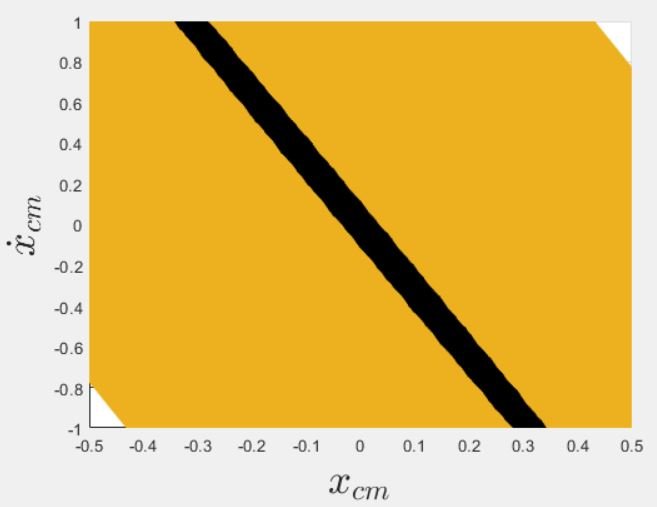
Capturability Analysis for LIPM
-

Unsupervised 3D KeyPoints
-
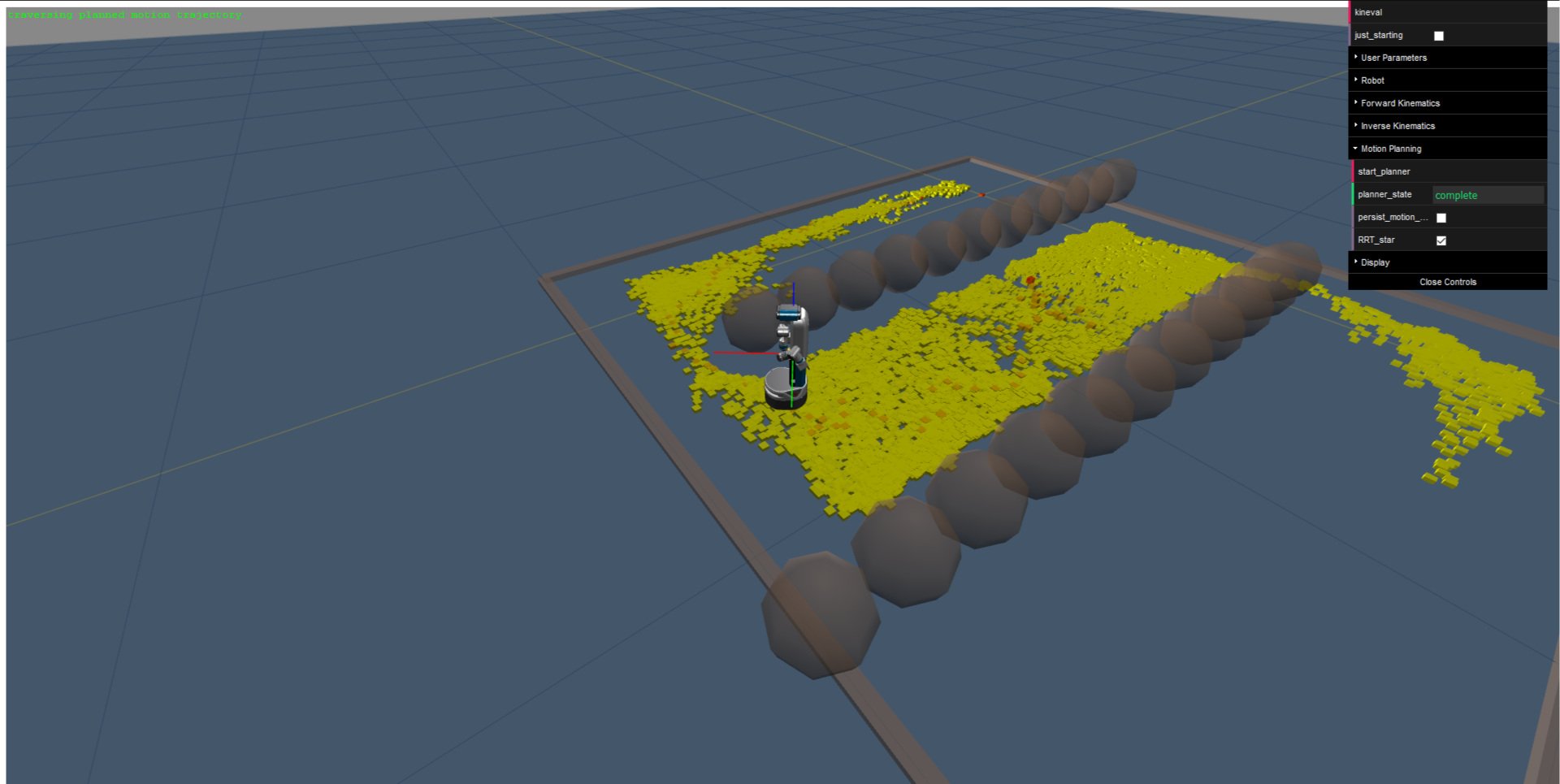
AutoRob Course
-

Design of a Water Tunnel to Study 3-D Stall Cells