
Trajectory Tracking Nonlinear Model Predictive Control for Stair Climbing of a Planar Five Link Walker.
This was the final project for AEROSP 740 Model Predictive Control class taught by Prof. Kolmanovsky. It was done in collaboration with Grant Gibson.
Summary.
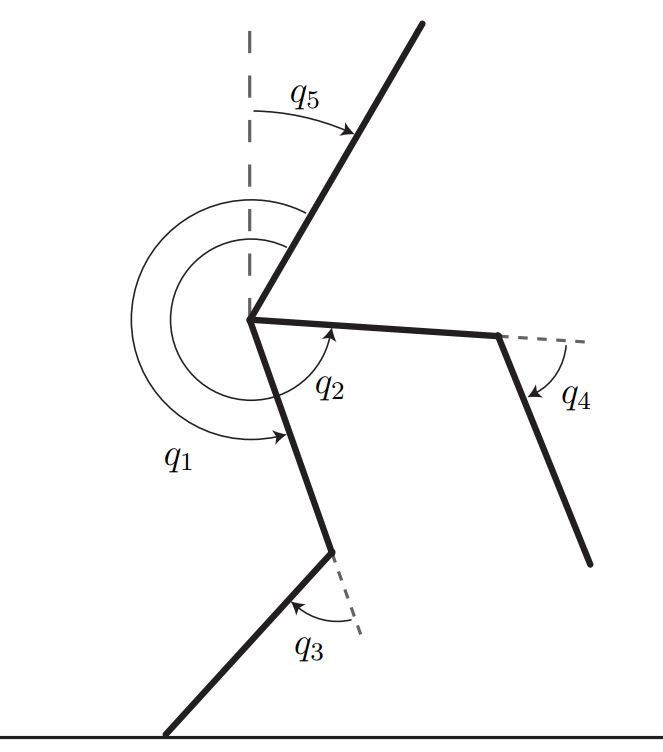
In this project we developed a trajectory tracking Nonlinear Model Predictive Controller(TT-NMPC) for stair climbing for the five link walker depicted in the figure to the left. The floating base model for the five link walker has 7 degrees of freedom. The trajectory was generated using the Fast Robotics Optimization and Simulation Toolbox by Prof. Ayonga Hereid. The TT-NMPC was solved for using CasADi and IPOPT.
Before we implemented our controller on the five link walker we validated it using the cart-pole system. In addition to implementing the controller on the cart-pole system and the five link, we also analyzed the stability and robustness of our controller to various initial conditions and perturbations. For more details and results, please see our final project report here.
Image description: five link walker[1]
References
C. C. J. H. C. Eric R. Westervelt, Jessy W. Grizzle and B. Morris,
Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press,
2009, ch. 5.