Design of a Turn in Place Controller of an Exoskeleton and Reachability Analysis.
This was a project that was done for the EECS 563: Hybrid Systems: Specification, Verification and Control course taught by Professor Necmiye Ozay.
Summary.
The objective of this project was to create a controller for the turn in place motion of the exoskeleton Atalante designed by Wandercraft, and to analyze the robustness of the controller by calculating the system’s reachable set. Turning in place is an important motion to achieve because it enables the exoskeleton to rapidly change directions allowing the user to perform tasks such as grasping an item, walking in a different direction, or sitting down. Many of the challenges that were encountered while investigating this problem came from the nonlinear and high degree-of-freedom hybrid dynamics.
The optimization toolbox Fast Robot Optimization and Simulation Toolkit by Professor Ayonga Hereid was utilized to generate the desired trajectories for turn in place. The reachability analysis was performed using CORA. Calculating the reachable set was a particularly challenging problem as most of the methods used to calculate reachable sets are not scalable. Therefore, the reachability analysis was first performed for a pendulum hitting a wall system and a three link robot walking. Unfortunately, due to time constraints, the reachability analysis of the exoskeleton was left for future work.
For more details please see the sections below.
Atalante turning -360 degrees at -14 degrees per step
Turn in Place Details
-
![]()
Hardware
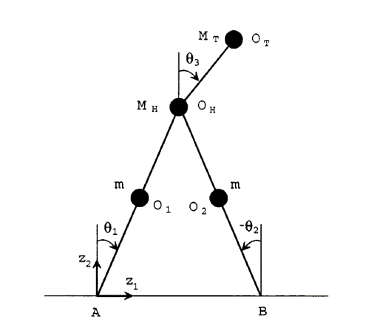
Atalante is a fully actuated lower-limb exoskeleton developed by Wandercraft for people with paraplegia. It has 12 actuated joints. [1]
Image description: “kinematic architecture of Atalante”[1]
-
![]()
Hybrid Systems Model
The hybrid system model consists of two domains, the left and right stance, and an instantaneous double support transition. During the right stance domain, only the right foot is in contact with the ground. Similarly, during the left stance, only the left foot is in contact with the ground. Both feet are on the ground during the double support domain.
The instantaneous impact of the swing foot with the ground is assumed to be inelastic. A reset map is utilized to calculate the states after impact. The transition between the right and left stance domains is triggered when the swing foot makes contact with the ground.
The floating base Lagrangian model is used to calculate the dynamic model of the exoskeleton for each of the continuous domains. Atalante’s floating base model has 18 degrees of freedom.
Image description: The hybrid system model of the turn in place motion. -
![]()
Generating and Executing the Motion
The objective of the optimization problem is to find the optimal turning gait by minimizing torque and velocity while respecting the equations of motion and user defined constraint functions. The user defined constraint functions include foot clearance, distance between the feet, initial yaw angle, and average speed.
The input/output feedback linearization controller (I/O controller) is chosen to achieve the optimal turning gait. The control objectives are the actuated joints.
Image Description: Ideal simulator result for -5 degree turn


Reachability
-
![]()
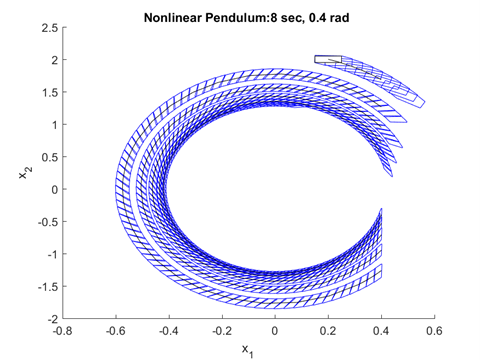
Pendulum Hitting a Wall
The pendulum system depicted in the figure above is similar to the bouncing ball example present in many reachability analysis papers. In the system above, the pendulum consists of a massless rod with length L=1 m, and a bob with mass m=2kg. The hybrid system of the pendulum hitting the wall consists of one domain with a reset after the pendulum collides with the wall. The collision of the pendulum with the wall as it swings has a coefficient of restitution of 0.75.
-
![]()
Pendulum Hitting a Wall Results
The reachable sets for both the linear and nonlinear dynamics of the system were analyzed for various initial sets. The initial sets were defined as zonotopes.
For the result above, the pendulum was set to hit the wall at 0.4 radians. The black rectangular box represents the initial set, the black line is the simulated trajectory from the initial state, the blue zonotopes are the reachable set, x1 is the pendulum angle theta, and x2 is the velocity. -
![]()
Three Link Robot
The three link robot [2] shown above is a planar robot with 2 actuators that are used to control the relative angles between the torso and the legs. Its hybrid system for walking consists of only one domain.
An input/output linearization controller was implemented, and the three link robot was able to walk infinite amounts of steps when simulated using ode45 in Matlab. -
![]()
Three Link Robot Results
To calculate its reachable set, the closed loop nonlinear pinned model dynamics of the three link robot were linearized about the middle state of the stable trajectory derived from the ode45 simulation. The initial set was represented using a zonotope.
The results shown above are for the three link robot simulated for 0.4s. Note that x1=theta 1, x2= theta 2, x3=theta 3, x4=theta 1 dot, x_5=theta2 dot, x_6=theta 3 dot.
As can be seen, the reachable set portrays an unstable trajectory where the robot appears to be doing splits. This phenomenon is well observed in the x2 vs x5 and x1 vs x4 plots above where the velocities can be seen decreasing and increasing respectively.
The phenomenon observed above is one that’s well studied in linear inverted pendulums(LIP). Since in the single support phase, a biped robot can be represented by a LIP [3], linearizing around a single state is comparable to keeping the height of the mass of the LIP constant in Z. This results in a trajectory that cannot be stabilized with a hybrid zero dynamic controller. To mitigate this problem in LIPs, the height of the center of mass is varied.



References
M. E. Mungai and J. W. Grizzle, "Feedback Control Design for Robust Comfortable Sit-to-Stand Motions of 3D Lower-Limb Exoskeletons," in IEEE Access, vol. 9, pp. 122-161, 2021, doi: 10.1109/ACCESS.2020.3046446.
Westervelt E., Grizzle J., Chevallereau C., Choi J., et al. Feedback Control of Dynamic Bipedal Robot Locomotion. CRC Press: 2007.
Kajita S., Kanehiro F., Kaneko K., Yokoi K., et al. IEEE/RSJ International Conference on Intelligent Robots and Systems(29Oct-3Nov. 2001). 10.1109/IROS.2001.973365