
Fall Prediction.
Overview
This ongoing project has yielded notable outcomes, including two first-author conference papers. One of these papers was presented at the International Conference on Electrical, Computer, Communications, and Mechatronics Engineering (ICECCME 2023), while the other has been accepted for presentation at the IEEE Conference on Robotics and Automation (ICRA 2024). A late-breaking abstract was also presented at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023).
This project aims to develop a fall prediction algorithm for bipedal robots that can predict potential falls with sufficient time to recover. The implementation of such algorithms is essential for the real-world deployment of bipedal robots due to the infeasibility of accounting for all perturbations and uncertainties while operating autonomously in dynamic environments. This infeasibility makes the occurrence of falls nearly unavoidable.
Below, we provide a summary of the papers associated with this project, along with pertinent background information.
Background
Falls can be attributed to faults, which are defined as unforeseen deviations in one or more operation variables. As depicted in Figure 1, faults can be classified into three types based on their time dependency: abrupt, incipient, and intermittent. Abrupt faults are rapidly varying, incipient faults are drift-like, and intermittent faults are sporadic. As we discuss in [1] each of these fault types can arise during real-world operation.
Relevant Definitions:
Critical faults: faults that lead to falls
Lead time: the time to react
Defined as the difference between the time of the actual fall and the predicted fall

Figure 1: Time Dependency of Faults
Results
-

Fall Prediction for Bipedal Robots: The Standing Phase
Fall Prediction and Lead Time Estimation for the Digit Humanoid designed by Agility Robotics both in Simulation and Hardware
Robot: Digit
Platform: Simulation & Hardware
Conference: Accepted to ICRA 2024
-

Fall Prediction of a Planar Four-Link Bipedal Robot
Physics-Based vs. Model-Based Fall Prediction Methods
Robot: Planar Four-Link Robot
Platform: Simulation
Conference: Late Breaking Abstract at IROS 2023
-
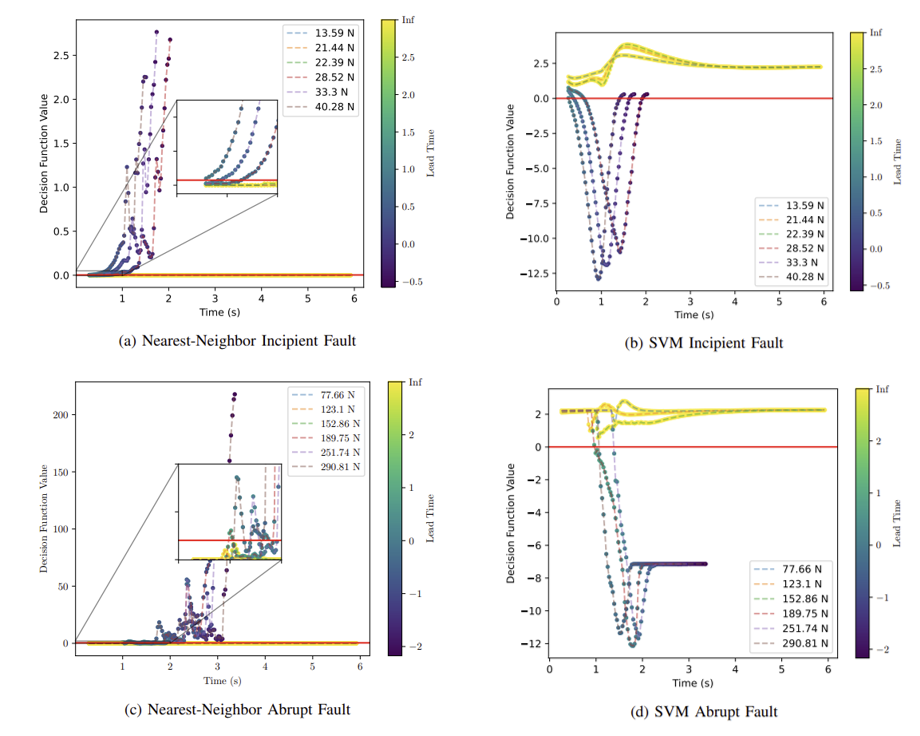
Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot
Comparison of the lead time achieved by a binary nearest-based method, binary SVM classifier, and multi-classification algorithm.
Robot: Planar Four-Link Robot
Platform: Simulation
Conference: Accepted to ICECCME 2023
References
M. E. Mungai, G. Prabhakaran, and J. Grizzle, “Fall Prediction for Bipedal Robots: The Standing Phase,” arXiv preprint arXiv:2309.14546 (2023), Submitted to ICRA 2024.
M. E. Mungai and J. Grizzle, "Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot," 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Tenerife, Canary Islands, Spain, 2023, pp. 1-7, doi: 10.1109/ICECCME57830.2023.10253317.