Fall Prediction of a Planar Four-Link Bipedal Robot
Summary
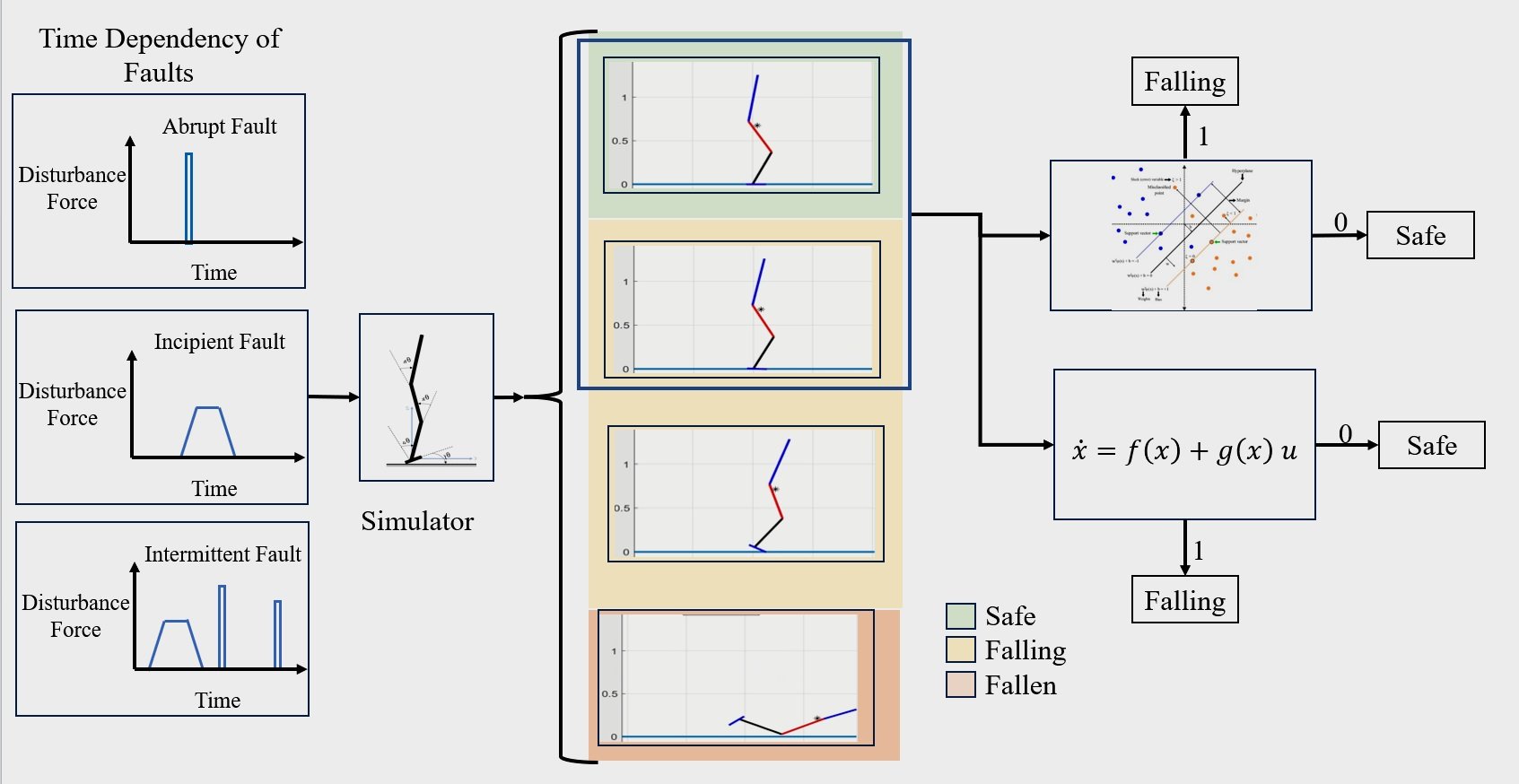
This is the late breaking abstrast that was submitted to IROS 2023. In this work, we introduced a physics-based fall prediction algorithm based on the contact interaction matrix and evaluated its performance in detecting abrupt and incipient faults to a binary SVM classifier. We found that the proposed physics-based algorithm was a viable option for predicting falls.
In addition to the evaluation of the physics-based model, we showed that the multi-classification algorithm introduced in [2] can detect intermittent faults in addition to incipient and abrupt faults.

References
M. E. Mungai, G. Prabhakaran, and J. Grizzle, “Fall Prediction for Bipedal Robots: The Standing Phase,” arXiv preprint arXiv:2309.14546 (2023), Submitted to ICRA 2024.
M. E. Mungai and J. Grizzle, "Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot," 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Tenerife, Canary Islands, Spain, 2023, pp. 1-7, doi: 10.1109/ICECCME57830.2023.10253317.