Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot
Summary
This paper aimed to design a fall prediction algorithm capable of detecting incipient and abrupt faults while maximizing the lead time and meeting the desired false positive and negative rates. The task of standing with a planar four-link robot is chosen as a way to simplify the fall prediction problem while providing a way to scale up to more dynamic motions and complex robots.
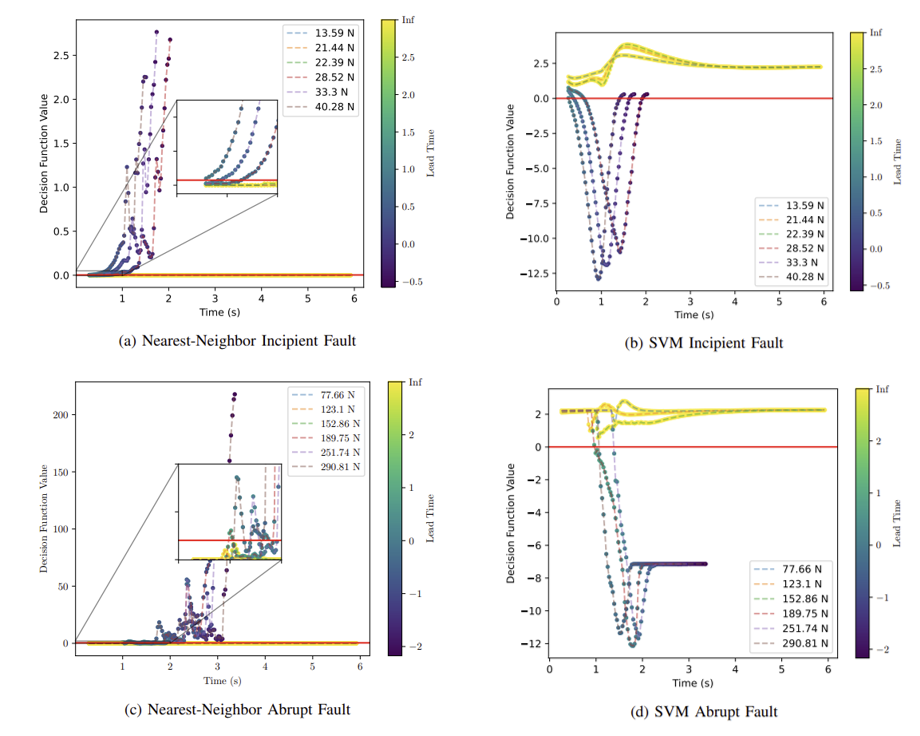
We proposed using training lead time, a subset of lead time, to label the windows in a trajectory in order to meet the desired upper bound on the false positive and negative rates. We successfully implemented a nearest-neighbor fall detection classification algorithm, and analyzed and compared its performance to an SVM classification-based algorithm. [2]
-
For legged robots to operate in complex terrains, they must be robust to the disturbances and uncertainties they encounter. This paper contributes to enhancing robustness by designing fall detection/prediction algorithms that will provide sufficient lead time for corrective motions to be taken. Falls can be caused by abrupt (fast-acting), incipient (slow-acting), or intermittent (non-continuous) faults. Early fall detection is a challenging task due to the masking effects of controllers (through their disturbance attenuation actions), the direct relationship between lead time and false positive rates, and the temporal behavior of the faults/underlying factors. In this paper, we propose a fall detection algorithm capable of detecting both incipient and abrupt faults while maximizing lead time and meeting desired thresholds on the false positive and negative rates.

References
M. E. Mungai, G. Prabhakaran, and J. Grizzle, “Fall Prediction for Bipedal Robots: The Standing Phase,” arXiv preprint arXiv:2309.14546 (2023), Submitted to ICRA 2024.
M. E. Mungai and J. Grizzle, "Optimizing Lead Time in Fall Detection for a Planar Bipedal Robot," 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Tenerife, Canary Islands, Spain, 2023, pp. 1-7, doi: 10.1109/ICECCME57830.2023.10253317.